It is great to showcase the innovations of a passionate team!
About 2-years ago the QUT Centre for Robotics Marine Robotics Team began refocusing our research portfolio creating what we call the Collaborative Ocean Robot Ecosystem (CORE). The CORE focuses on seven pillars of software and hardware innovation:
🔹 Collaboration Frameworks: Multi-platform coordination, task planning, allocation and execution. Includes inference of other vessels’ pose and intent without communication. 🔹 Simulation & Digital Twin: High-fidelity surface and subsurface ocean multi-robot simulators for real-time mixed virtual and physical ocean robot collaboration (ROS and ROS2 compatible). 🔹 Advanced Perception: Multi-camera (visual and non-visible spectrum) and acoustic real-time perception, navigation and tracking systems. 🔹 Perception to Action: Onboard AI and decision support systems for real-time automated intervention. 🔹 Novel Platforms & Payloads: Unique sensing and sampling platforms including ASVs, AUVs, hyperspectral imaging and samplers (e.g., eDNA). 🔹 Human Robot Interfaces: User interfaces for multi-platform collaborative task planning and execution, including gesture-based human robot interaction. 🔹 Regulation & Compliance: Multi-vessel COLREG evaluation, classification and collision avoidance frameworks.
Our CORE innovations continue to be guided by in-house, industry and philanthropic projects targeting solutions for real-world challenges relating to ocean conservation, natural resource management, safeguarding Australia, and education.
A special thanks to our philanthropic, industry and academic project sponsors which have helped guide the ecosystem: QUT Centre for Robotics, Oceankind, Seqwater, DSTG.
Stay tuned as we will be posting more on the CORE component technologies.
Image credits: Serena Mou, Matthew Dunbabin, Michael Venz, Peter Smith and Keolohilani H. Lopes Jr..
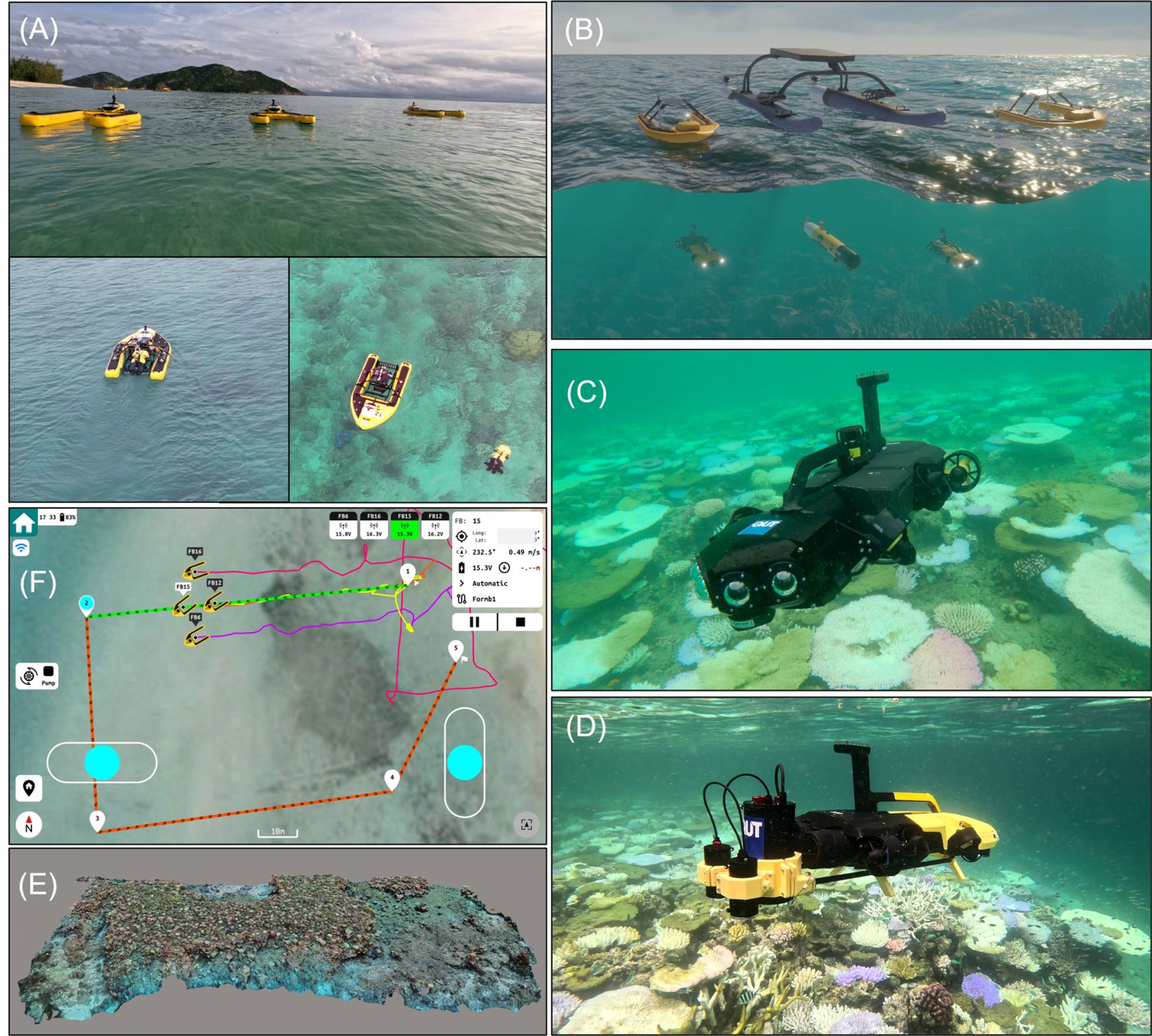
Images are examples from deploying the CORE technologies: Clockwise from Top Left; (A) Collaborative robot field deployments; (upper) formation control, (lower) ASV and AUV collaborative docking, deployment and mapping. (B) Screen capture of the High-Fidelity Virtual and Physical Robot Ocean Simulator with six heterogeneous ASV and AUV platforms operating collaboratively. (C) The Seamore AUV with nearly 160-degree field-of-view stereo vision for close-proximity contour following of underwater objects. (D) A custom hyperspectral camera and lighting payload attached to an AUV. (E) Example acre-scale high-resolution seabed map generated using collaborative ASVs. (F) Screen capture of the Sage multi-platform planning, coordination, and control user interface app with four ASVs undertaking a formation mission.
#marinerobotics, #collaborativerobotics, #digitaltwin

